Abstract
Considering how to make the model accurately understand and follow natural language instructions and perform actions consistent with world knowledge is a key challenge in robot manipulation. This mainly includes human fuzzy instruction reasoning and the following of physical knowledge. Therefore, the embodied intelligence agent must have the ability to model world knowledge from training data. However, most existing vision and language robot manipulation methods mainly operate in less realistic simulators and language settings and lack explicit modeling of world knowledge.
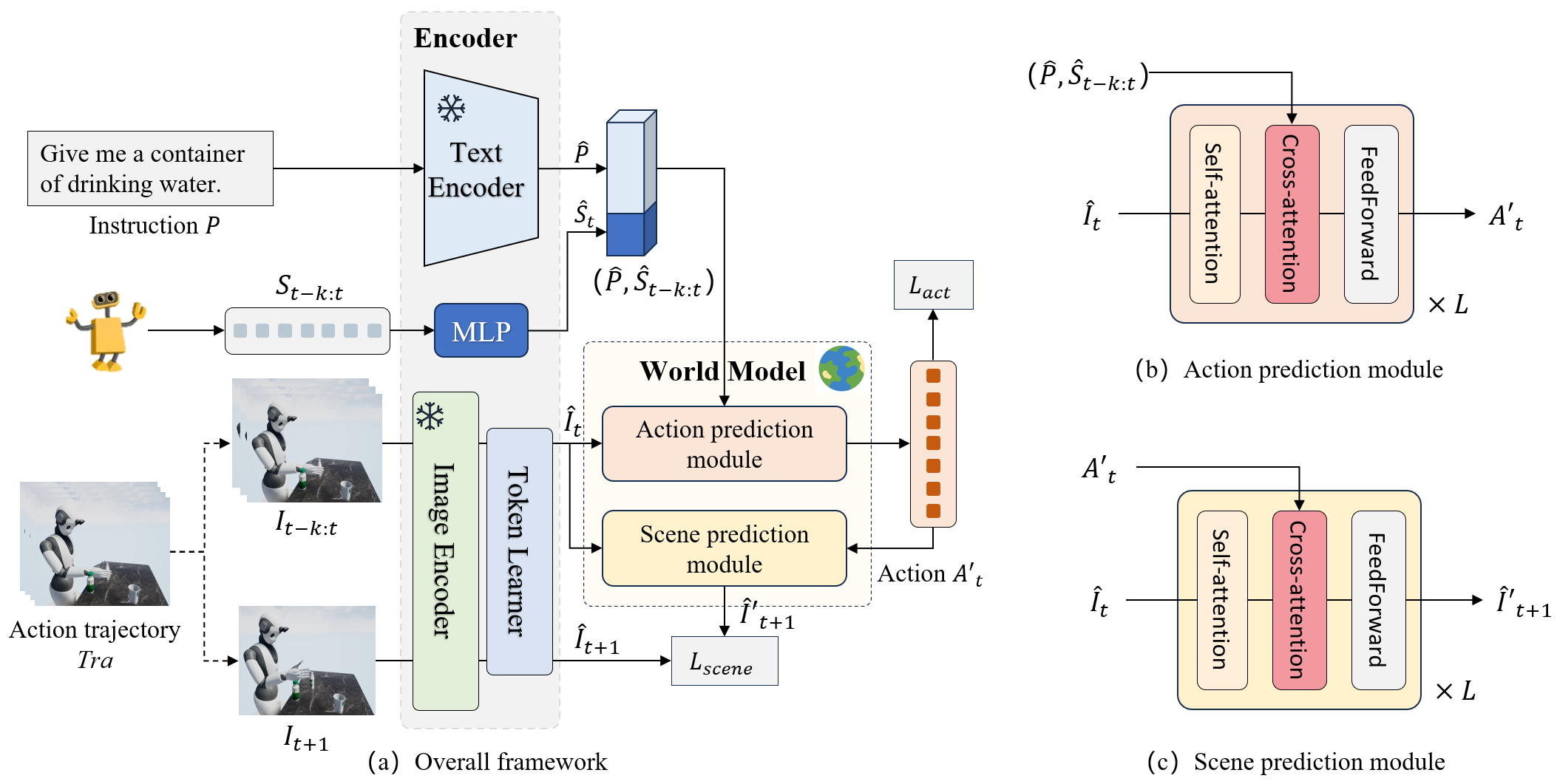
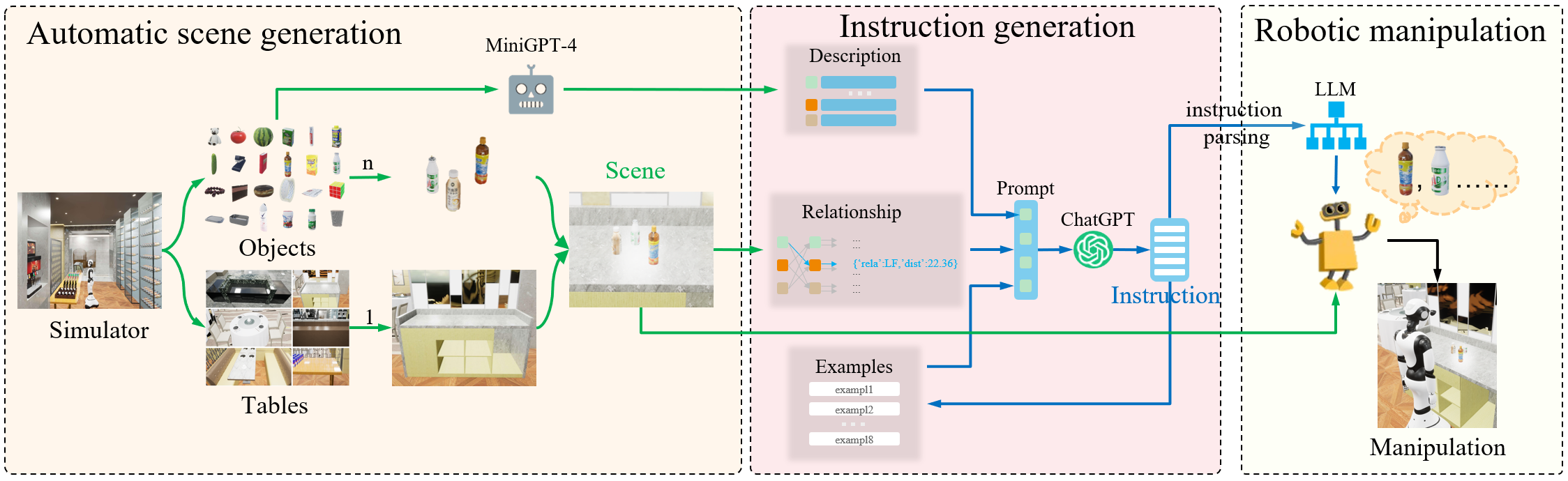
To bridge this gap, we introduce a novel and simple robot manipulation framework, called Surfer. It is based on the world model, treats robot manipulation as a state transfer of the visual scene, and decouples it into two parts: action and scene. Then, the generalization ability of the model on new instructions and new scenes is enhanced by explicit modeling of the action and scene prediction in multi-modal information. In addition to the framework, we also built a robot manipulation simulator that supports physics execution based on the MuJoCo physics engine. It can automatically generate demonstration training data and test data, effectively reducing labor costs.
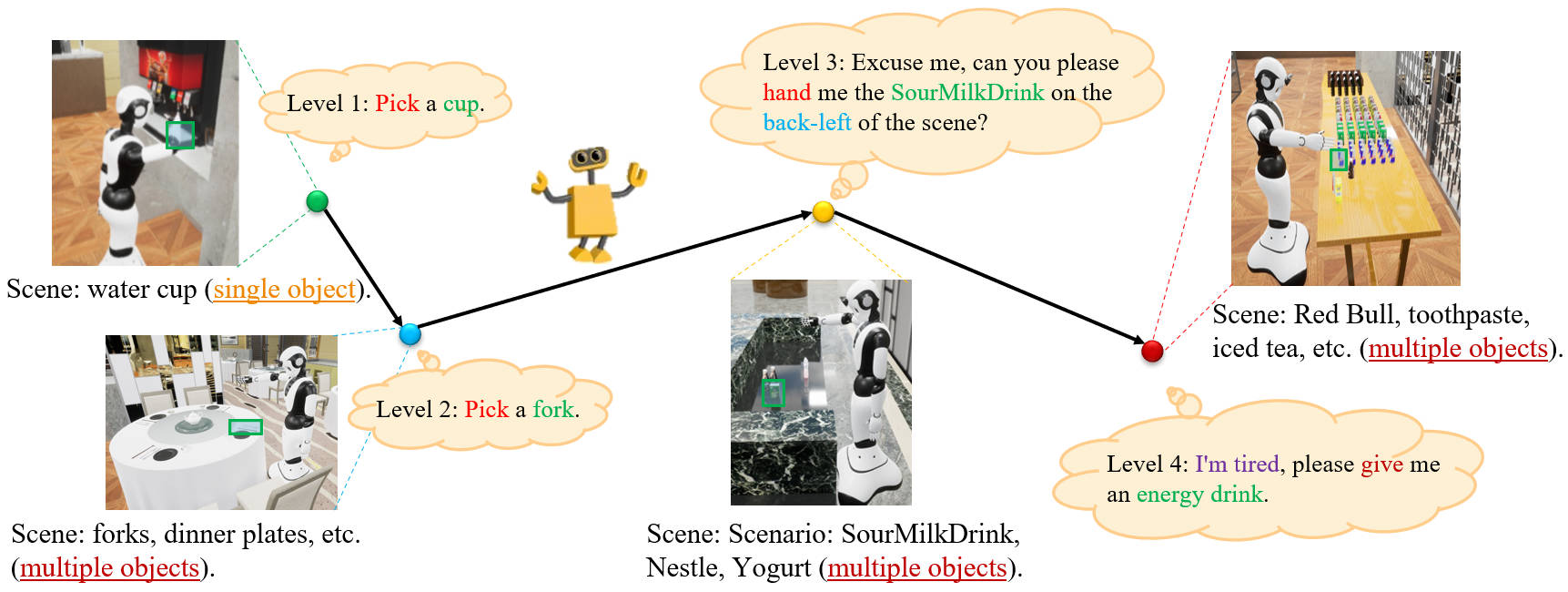
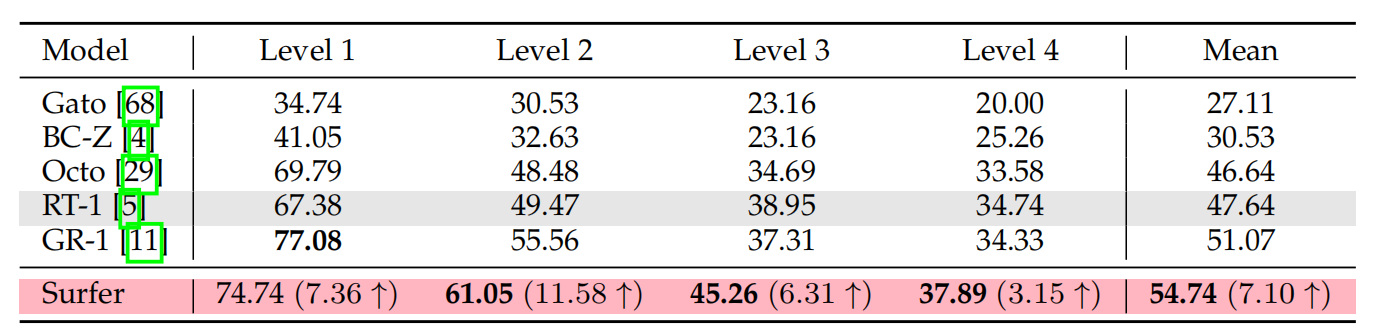
To conduct a comprehensive and systematic evaluation of the robot manipulation model in terms of language understanding and physical execution, we also created a robotic manipulation benchmark with progressive reasoning tasks, called SeaWave. It contains 4 levels of progressive reasoning tasks and can provide a standardized testing platform for embedded AI agents in multi-modal environments. Overall, we hope Surfer can freely surf in the robot's SeaWave benchmark. Extensive experiments show that Surfer consistently outperforms all baselines by a significant margin in all manipulation tasks. On average, Surfer achieved a success rate of 54.74% on the defined four levels of manipulation tasks, exceeding the best baseline performance of 51.07%.
Surfer
The overall framework of Surfer. It is a manipulation model based on the world model to simulate the physical laws of robot action execution. Sufer’s world model is mainly composed of an action prediction module and a scene prediction module. They are guided by language instructions P and predicted actions A′ respectively, helping the model learn physical laws from the robot’s historical action trajectories I.